MR107M Brazo robótico colaborativo de 6 ejes con cámara y equipo de enseñanza de pinzas Equipo de entrenamiento de mecatrónica educativo
Demostración, programación de robots, equipos de formación profesional de alta tecnología. Radio de trabajo: 500 mm Carga de transporte: 3 kg Repetibilidad: +/- 0,1 mm Operación de control: pantalla táctil de 12 pulgadas con interfaz de diseño gráfico fácil de usar
Grados de libertad: 6 articulaciones giratorias
Interfaz de E / S: 16 DI, 16 DO, 2 AI, 2 AO
Pinza eléctrica: fuerza de agarre ajustable 3 N, máx. 40 N, carrera máx. 110 mm
Sistema de cámara: Resolución máxima: 5 Mpx (2560 x 1920), frecuencia máxima de imagen: 30 fps

1. Descripción general del producto
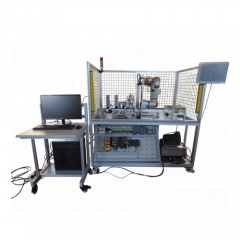
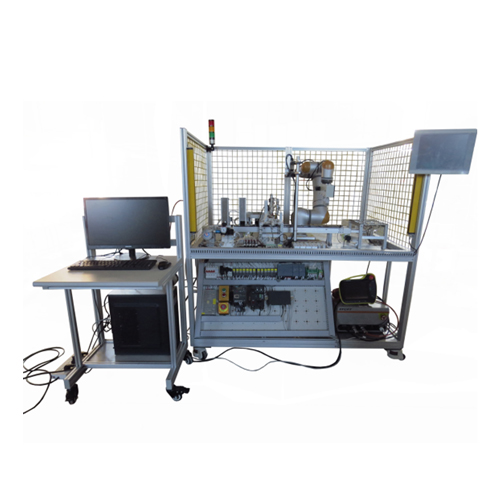
Este equipo toma robots industriales y visión artificial como núcleo, integra orgánicamente mecánica, neumática, control de movimiento, regulación de velocidad de conversión de frecuencia, tecnología de control PLC, estructura modular, fácil de combinar, para lograr una rápida detección y ensamblaje de diferentes materiales. Con el fin de facilitar la formación práctica y la enseñanza, el sistema ha sido especialmente diseñado para completar varios tipos de formación individual de robots y formación integral de proyectos, y para completar varios tipos de formación individual de robots y formación integral de proyectos. Se puede llevar a cabo la enseñanza, el posicionamiento, la sujeción, el montaje, el almacenamiento y otros entrenamientos del robot de seis ejes,
Incluye robots industriales de seis grados de libertad, sistemas inteligentes de inspección visual, sistemas de control PLC y un conjunto de mecanismos de alimentación, transporte, ensamblaje y almacenamiento, que pueden implementar operaciones como clasificación, prueba, manipulación, ensamblaje y almacenamiento de piezas de trabajo.
Todos los componentes de la plataforma están instalados en la mesa de perfiles. La estructura mecánica, el circuito de control eléctrico y el actuador son relativamente independientes y están diseñados con piezas industriales estándar. A través de esta plataforma, se puede capacitar en diversos aspectos, como ensamblaje mecánico, diseño y cableado de circuitos eléctricos, programación y depuración de PLC, edición de procesos visuales inteligentes, aplicaciones de depuración y programación de robots industriales, y es adecuado para universidades vocacionales y relacionadas con la automatización de escuelas técnicas. Grandes Ligas. La formación práctica de cursos como "Tecnología de control" y "Tecnología de automatización" son adecuados para que los técnicos de automatización lleven a cabo entrenamientos de ingeniería y concursos de habilidades.

2. Desempeño técnico
1. Energía de entrada: monofásica ~ 220V ± 10% 50Hz
2. Ambiente de trabajo: temperatura -10 ℃ ~ + 40 ℃, humedad relativa ≤85% (25 ℃), altitud <4000m
3. Capacidad del dispositivo: <1,5 kVA
4. El tamaño de la plataforma de entrenamiento: 1500 mm × 880 mm × 1400 mm
5. Protección de seguridad: con protección contra fugas, la seguridad cumple con los estándares nacionales.
3. Estructura y composición del equipo
La plataforma de formación consta de un sistema de robot industrial de seis grados de libertad, un sistema de inspección visual inteligente, un sistema de controlador programable (PLC), una unidad de alimentación, una unidad transportadora, una unidad de almacenamiento temporal de residuos de alimentación, una unidad temporal de residuos de procesamiento. unidad de almacenamiento, una unidad de ensamblaje de piezas de trabajo, consta de una unidad de almacenamiento, varias piezas de trabajo, mesa de entrenamiento de perfil, escritorio de computadora de perfil, etc.
1. Sistema de robot industrial de seis grados de libertad
2. Sistema de inspección visual inteligente
3. Unidad de controlador programable Siemens
4. Unidad de alimentación
5. Unidad de transporte
6. Unidad de montaje de piezas de trabajo
7. Unidad de almacén
8. Almacenamiento temporal de productos de desecho
4. Proyectos de formación práctica
1. Principio, uso y depuración del sistema de visión artificial
2. El principio, uso y depuración del sistema de robot industrial de seis ejes.
3. Calibración y conversión mutua entre el sistema de coordenadas del robot industrial de seis ejes y el sistema de coordenadas de visión artificial
4. Instalación y puesta en marcha de aplicaciones integradas de robots industriales y sistemas de visión artificial.
5. Configuración, programación y depuración de plantillas de sistemas de visión artificial
6. Depuración manual de robots industriales a través de la unidad didáctica
7. Establecer y modificar las coordenadas de cada punto de control a través de la unidad didáctica
8. Escribir y modificar programas de robots industriales a través de la unidad didáctica.
9. Configuración de coordenadas de seguimiento del robot
10. Desarrollo de software y programación de un sistema de robot industrial.